Payload-Mass-Aware Trajectory Planning on Multi-User Autonomous Unmanned Aerial Vehicles
Abstract
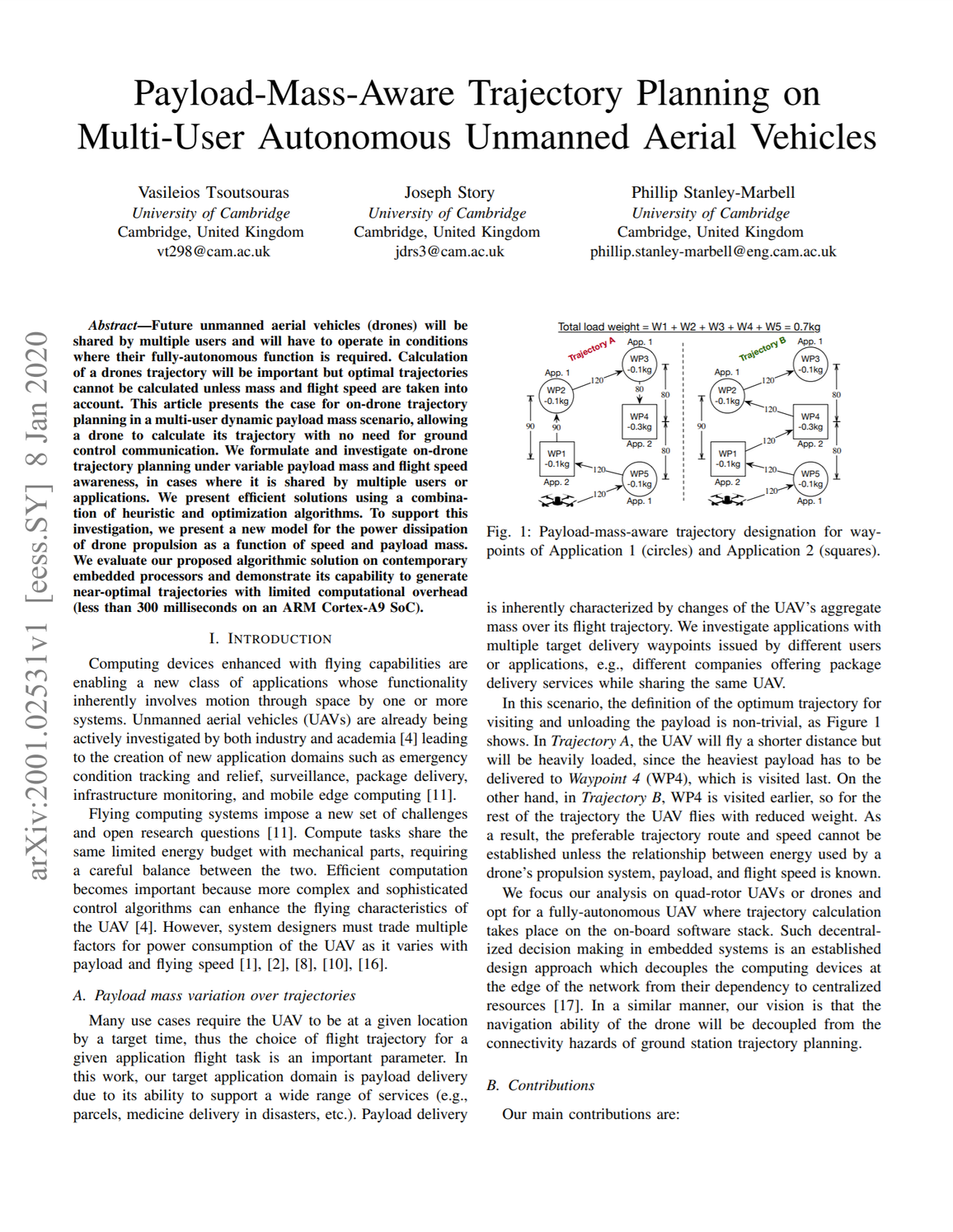
Future unmanned aerial vehicles (drones) will be shared by multiple users and will have to operate in conditions where their fully-autonomous function is required. Calculation of a drones trajectory will be important but optimal trajectories cannot be calculated unless mass and flight speed are taken into account. This article presents the case for on-drone trajectory planning in a multi-user dynamic payload mass scenario, allowing a drone to calculate its trajectory with no need for ground control communication. We formulate and investigate on-drone trajectory planning under variable payload mass and flight speed awareness, in cases where it is shared by multiple users or applications. We present efficient solutions using a combination of heuristic and optimization algorithms. To support this investigation, we present a new model for the power dissipation of drone propulsion as a function of speed and payload mass. We evaluate our proposed algorithmic solution on contemporary embedded processors and demonstrate its capability to generate near-optimal trajectories with limited computational overhead (less than 300 milliseconds on an ARM Cortex-A9 SoC).
Cite as:
Tsoutsouras, Vasileios et al. “Payload-Mass-Aware Trajectory Planning on Multi-User Autonomous Unmanned Aerial Vehicles.” ArXiv abs/2001.02531 (2020).
BibTeX:
@misc{tsoutsouras2020payloadmassaware,
title={Payload-Mass-Aware Trajectory Planning on Multi-User Autonomous Unmanned Aerial Vehicles},
author={Vasileios Tsoutsouras and Joseph Story and Phillip Stanley-Marbell},
year={2020},
eprint={2001.02531},
archivePrefix={arXiv},
primaryClass={eess.SY}
}
{kind=link}