Automated Physics-Derived Code Generation for Sensor Fusion and State Estimation
Abstract
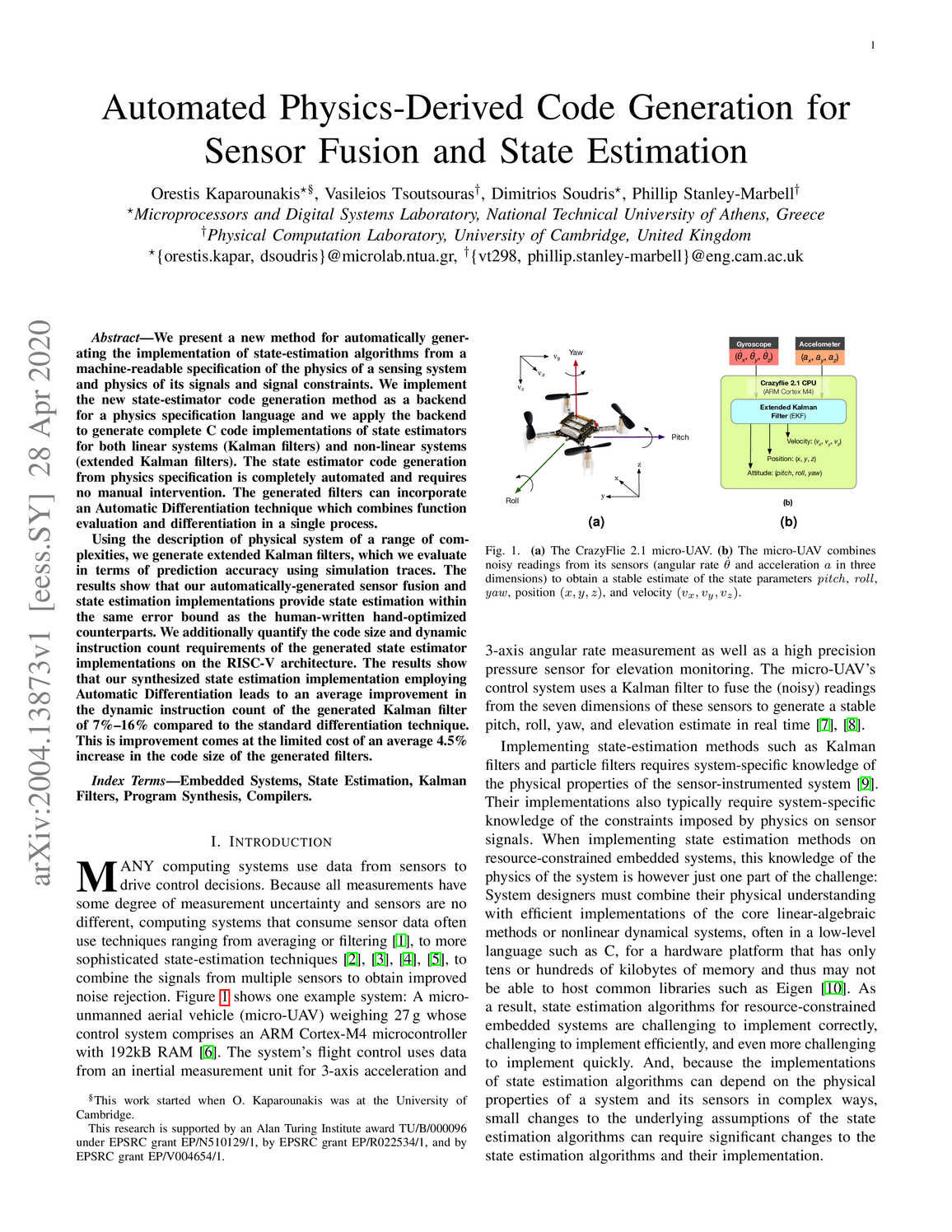
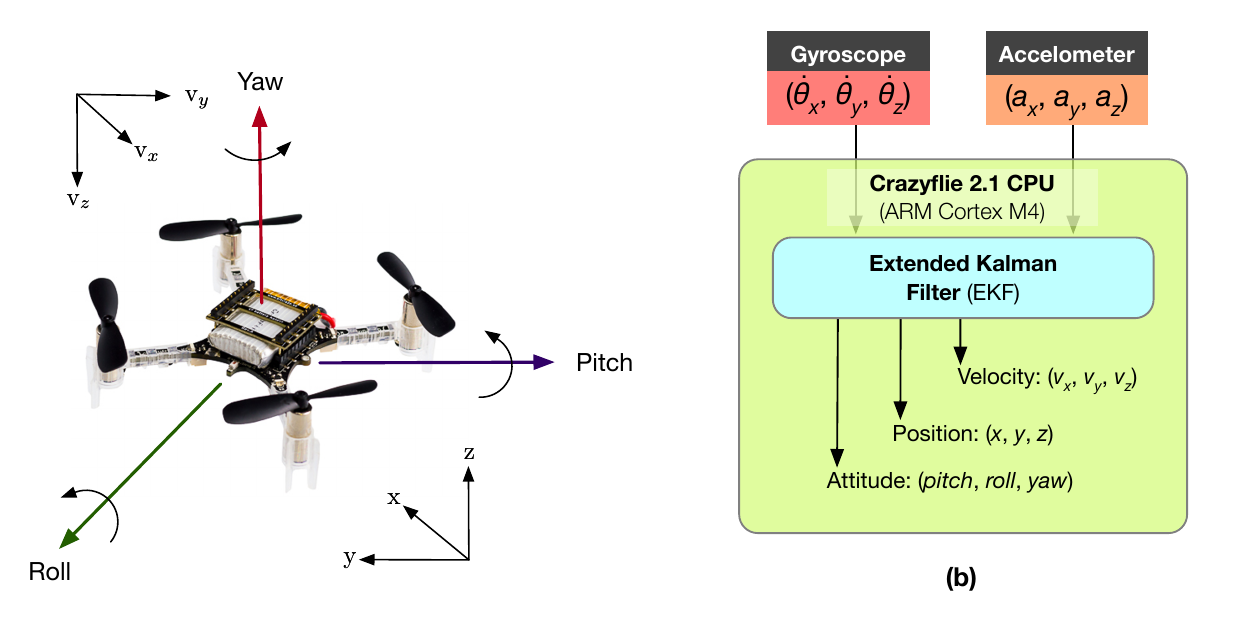
We present a new method for automatically generating the implementation of state-estimation algorithms from a machine-readable specification of the physics of a sensing system and physics of its signals and signal constraints. We implement the new state-estimator code generation method as a backend for a physics specification language and we apply the backend to generate complete C code implementations of state estimators for both linear systems (Kalman filters) and non-linear systems (extended Kalman filters). The state estimator code generation from physics specification is completely automated and requires no manual intervention. The generated filters can incorporate an Automatic Differentiation technique which combines function evaluation and differentiation in a single process. Using the description of physical system of a range of complexities, we generate extended Kalman filters, which we evaluate in terms of prediction accuracy using simulation traces. The results show that our automatically-generated sensor fusion and state estimation implementations provide state estimation within the same error bound as the human-written hand-optimized counterparts. We additionally quantify the code size and dynamic instruction count requirements of the generated state estimator implementations on the RISC-V architecture. The results show that our synthesized state estimation implementation employing Automatic Differentiation leads to an average improvement in the dynamic instruction count of the generated Kalman filter of 7%-16% compared to the standard differentiation technique. This is improvement comes at the limited cost of an average 4.5% increase in the code size of the generated filters.
Cite as
Kaparounakis, O., Tsoutsouras, V., Soudris, D., & Stanley-Marbell, P. (2020). Automated physics-derived code generation for sensor fusion and state estimation. arXiv preprint arXiv:2004.13873.
Bibtex
@article{kaparounakis2020automated,
title={Automated physics-derived code generation for sensor fusion and state estimation},
author={Kaparounakis, Orestis and Tsoutsouras, Vasileios and Soudris, Dimitrios and Stanley-Marbell, Phillip},
journal={arXiv preprint arXiv:2004.13873},
year={2020}
}


{kind=link}